ENGLISH
首页
标准和方法
空间法分析
场景法分析
主要特性
案例介绍
CFD
易路溯源
关于我们
联系我们
场景性分析
建立三维模型
对于不同类型的项目, 其原始的数据不一定有三维图形系统, 一些已有工厂只有平面图和立面图, 有些工厂有三维图形, 但可能会和现实情况会有所出入, 有些工厂完全没有图纸。对于不同的情况, 工程师或设计师应根据实际情况判断是否有必要进行现场勘察, 以确定所建立的三维模型是符合工况实际条件的, 这一点非常重要, 后面步骤的数值化设计的准确与否的第一步就是基于三维模型, 模型的准确性将直接决定分析的准确性。
区域定义和目标气体定义
一个工厂往往是由很多不同功能的装置区组成, 这些装置区不仅物理位置不同, 其工艺不同因而产生的危险因素也不相同。 通常设计师需要在开始分析之前, 对区域的物理位置以及危险因素种类综合考虑后, 将工厂分为各自独立的一系列区域, 随后明确区域中需要探测哪类气体泄漏。
环境定义
工厂所在地区, 气候条件有各自不同的情况特点, 这里的环境就是指一年之中当地的风向,风速以及温度。通常来讲工厂可以提供气象玫瑰图即可获取这些信息。
泄漏定义
在做物理性分析时, 无须定义泄漏点, 只需要定义好目标后即可执行。但是场景性分析中却需要将泄漏点,泄漏介质以及泄漏流速定义的非常明确方可进行下一步的分析计算。
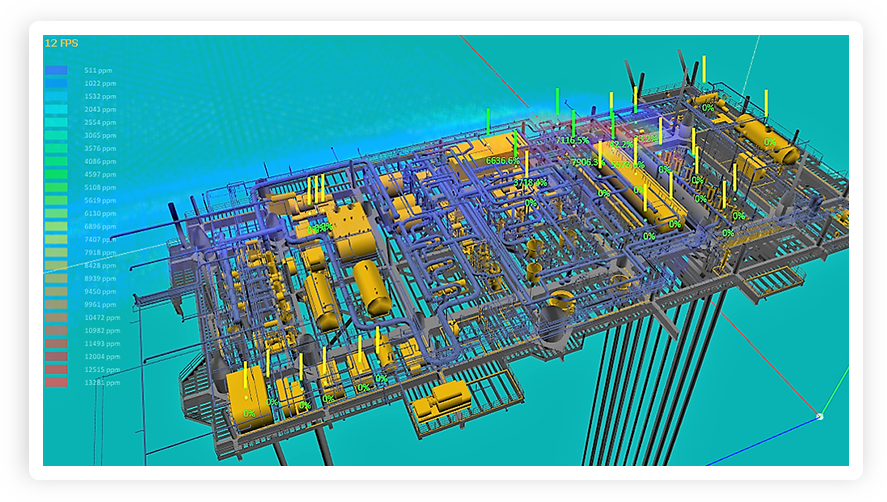
场景定义及CFD气云计算
场景是由环境(Scene)定义和泄漏(Leak)定义所组成, 每一个场景下其环境和泄漏都是确定的, 因而其产生的气云云团也是确定的。每一个场景都有对应的气云分布, 我们可称为Cloud Mapping。GCV软件会罗列出所有可能的场景,并通过引入CFD技术对这些场景进行计算分析,模拟得出每个场景所对应的气云。
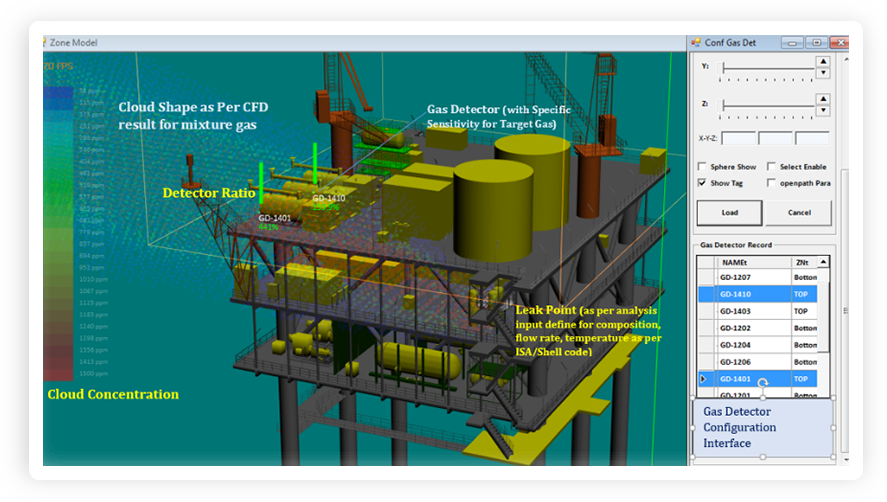
探测器布置
设计保护目标周围的探测器数量,位置,类型,角度。探测器的各种参数(如垂直覆盖角度,水平覆盖角度和距离)可以在数据库中根据不同厂商的不同型号创建或编辑。对于设计者或咨询顾问来说,通过添加新探测器或改变探测器的位置和角度,可以非常方便地看到探测器覆盖率的变化。
分析计算
GCV分析软件协助设计师计算出气云浓度比对气体探测器探测性能即灵敏度的比率, 以此来了解探测器组合配置对于气云捕获情况的效果。工程师或设计师需要根据比对的结果对探测器设计作进一步的调整。